Python+OpenCVのカラートラッキングで振り子の運動を測定する方法をソースコード付きで解説します。
Python+OpenCVで振り子の運動を測定
前回、ブロブ解析+カラートラッキングで物体追跡を行う方法を紹介しました。

【Python/OpenCV】ブロブ解析+カラートラッキングで物体追跡
Python+OpenCVのブロブ解析+カラートラッキングで物体追跡する方法をソースコード付きで解説します。
python.joho.info
2024.02.07
今回は、上記ページのプログラムを応用して、赤色の振り子を色追跡し、その中心座標を記録してグラフ化してみます。
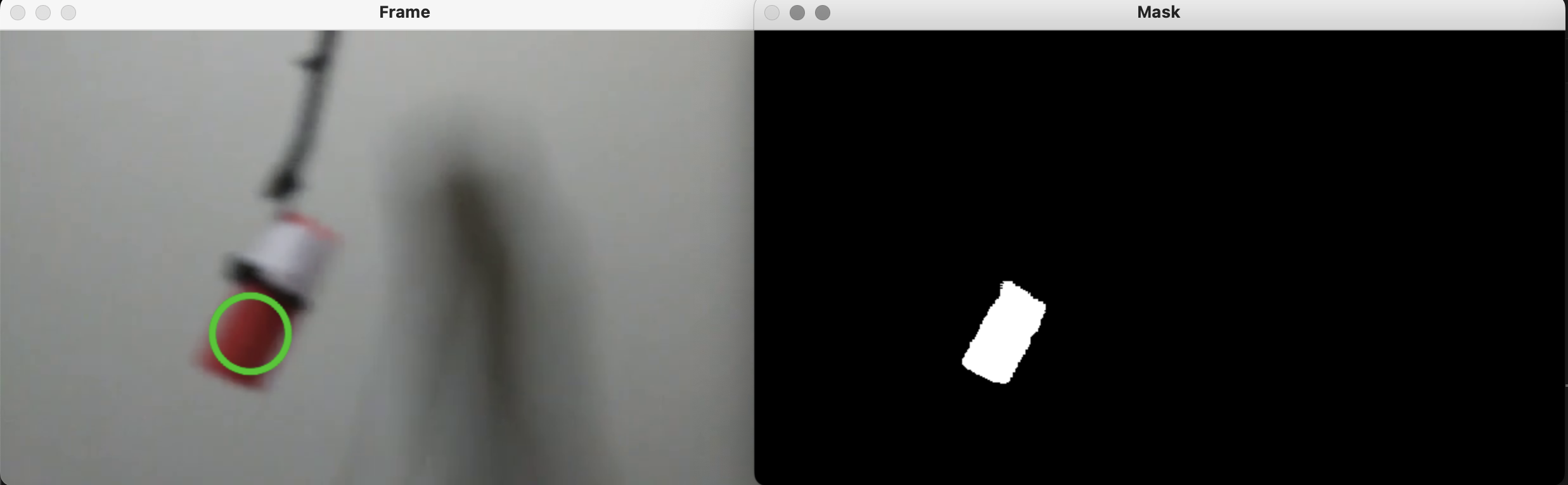
今回解説するプログラムの実行結果
■赤色の振り子を追跡している様子
■グラフ化した結果
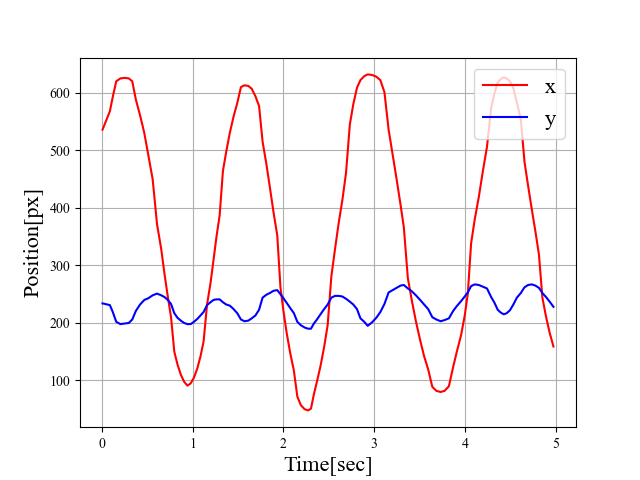
グラフの横軸は経過時間[sec]、縦軸は赤色物体の位置座標(x,y)[px]です。
振り子の周期運動を観測できていることがわかります。
サンプルコード①赤色の振り子を追跡し、中心座標を記録
赤色の振り子を追跡し、中心座標をテキストファイル(data.txt)に記録するサンプルプログラムのソースコードです。
サンプルコード②記録データをグラフ化
記録データ(data.txt)をグラフ化するサンプルプログラムのソースコードです。
サンプルコード①の詳細解説
サンプルコード①のの各部分を詳しく解説します。
インポートと初期設定
import cv2
import numpy import time
cv2: OpenCVライブラリを使用して画像処理を行います。OpenCVはコンピュータビジョンのための強力なツールです。np: NumPyライブラリを使用して数値計算を行います。NumPyは配列操作や数値計算に便利です。time: 時間計測を行います。プログラムの実行時間を取得し、座標と一緒に記録するために使用します。
赤色検出関数
def red_detect(img):
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
hsv_min = np.array([0,127,0])
hsv_max = np.array([30,255,255])
mask1 = cv2.inRange(hsv, hsv_min, hsv_max)
hsv_min = np.array([150,127,0])
hsv_max = np.array([179,255,255])
mask2 = cv2.inRange(hsv, hsv_min, hsv_max)
return mask1 + mask2
- HSV色空間への変換:
cv2.cvtColor(img, cv2.COLOR_BGR2HSV)は、BGR色空間からHSV色空間に画像を変換します。HSV色空間は色相(Hue)、彩度(Saturation)、明度(Value)で色を表現します。
- 赤色の範囲を定義:
hsv_minとhsv_maxは赤色の範囲を定義します。赤色は2つの範囲(0-30度と150-179度)で表現されます。
- マスクの作成:
cv2.inRange(hsv, hsv_min, hsv_max)は、指定した範囲内のピクセルを白(255)、それ以外を黒(0)にするマスクを作成します。
- マスクの合成:
mask1 + mask2で2つのマスクを合成し、最終的な赤色検出マスクを作成します。
ブロブ解析関数
def analysis_blob(binary_img):
label = cv2.connectedComponentsWithStats(binary_img)
n = label[0] - 1
data = np.delete(label[2], 0, 0)
center = np.delete(label[3], 0, 0)
max_index = np.argmax(data[:, 4])
maxblob = {}
maxblob["upper_left"] = (data[:, 0][max_index], data[:, 1][max_index])
maxblob["width"] = data[:, 2][max_index]
maxblob["height"] = data[:, 3][max_index]
maxblob["area"] = data[:, 4][max_index]
maxblob["center"] = center[max_index]
return maxblob
- ラベリング処理:
cv2.connectedComponentsWithStats(binary_img)は、2値画像の連結成分(ブロブ)をラベリングし、各ブロブの統計情報を取得します。
- 不要なデータの削除:
np.delete(label[2], 0, 0)とnp.delete(label[3], 0, 0)で背景のラベルを削除します。
- 最大ブロブの検出:
np.argmax(data[:, 4])で面積が最大のブロブのインデックスを取得します。
- 最大ブロブの情報取得:
- 最大ブロブの左上座標、幅、高さ、面積、中心座標を取得し、
maxblob辞書に格納します。
- 最大ブロブの左上座標、幅、高さ、面積、中心座標を取得し、
メイン関数
def main():
data = []
videofile_path = "C:/github/sample/python/opencv/video/color_tracking/red_pendulum.mp4"
csvfile_path = "C:/github/sample/python/opencv/video/color_tracking/data.csv"
cap = cv2.VideoCapture(videofile_path)
start = time.time()
while(cap.isOpened()):
ret, frame = cap.read()
mask = red_detect(frame)
target = analysis_blob(mask)
center_x = int(target["center"][0])
center_y = int(target["center"][1])
cv2.circle(frame, (center_x, center_y), 30, (0, 200, 0), thickness=3, lineType=cv2.LINE_AA)
data.append([time.time() - start, center_x, center_y])
cv2.imshow("Frame", frame)
cv2.imshow("Mask", mask)
if cv2.waitKey(25) & 0xFF == ord('q'):
break
np.savetxt(csvfile_path, np.array(data), delimiter=",")
cap.release()
cv2.destroyAllWindows()
- データ格納用リストの初期化:
data = []で追跡データを格納するリストを初期化します。
- 動画ファイルとCSVファイルのパス設定:
videofile_pathとcsvfile_pathで動画ファイルとCSVファイルのパスを設定します。
- 動画キャプチャの開始:
cv2.VideoCapture(videofile_path)で動画ファイルを読み込みます。
- 開始時間の記録:
start = time.time()でプログラムの開始時間を記録します。
- フレームごとの処理:
while(cap.isOpened())で動画が終了するまでフレームを読み込みます。ret, frame = cap.read()でフレームを取得します。mask = red_detect(frame)で赤色物体を検出します。target = analysis_blob(mask)で最大ブロブの情報を取得します。center_xとcenter_yでブロブの中心座標を取得します。cv2.circle(frame, (center_x, center_y), 30, (0, 200, 0), thickness=3, lineType=cv2.LINE_AA)でフレームに円を描画します。data.append([time.time() - start, center_x, center_y])で経過時間と中心座標をリストに追加します。cv2.imshow("Frame", frame)とcv2.imshow("Mask", mask)でフレームとマスクを表示します。if cv2.waitKey(25) & 0xFF == ord('q')で’q’キーが押されたらループを終了します。
- データの保存とリソースの解放:
np.savetxt(csvfile_path, np.array(data), delimiter=",")でデータをCSVファイルに保存します。cap.release()でキャプチャを解放し、cv2.destroyAllWindows()でウィンドウを閉じます。
サンプルコード②の詳細解説
サンプルコード②は、サンプルコード①で記録した赤色物体の動きをCSVファイルから読み込み、時間に対するx座標とy座標の変化をグラフにプロットするものです。
以下に各部分の詳細な解説をします。
インポートと初期設定
import numpy as np
import matplotlib.pyplot as plt
numpy: 数値計算ライブラリで、配列操作や数値計算に使用します。matplotlib.pyplot: グラフ描画ライブラリで、データの可視化に使用します。
メイン関数
def main():
data = np.genfromtxt("/Users/github/sample/python/opencv/video/color_tracking/data.csv", delimiter=",", dtype='float')
np.genfromtxt: CSVファイルを読み込み、NumPy配列としてデータを取得します。delimiter=","はカンマ区切りを指定し、dtype='float'はデータ型を浮動小数点数に指定します。
データの分割
t = data[:,0]
x = data[:,1]
y = data[:,2]
data[:,0]: 経過時間のデータを取得します。data[:,1]: x座標のデータを取得します。data[:,2]: y座標のデータを取得します。
グラフのプロット
plt.rcParams["font.family"] = "Times New Roman"
plt.plot(t, x, "r-", label="x")
plt.plot(t, y, "b-", label="y")
plt.xlabel("Time[sec]", fontsize=16)
plt.ylabel("Position[px]", fontsize=16)
plt.grid()
plt.legend(loc=1, fontsize=16)
plt.show()
- フォントの設定:
plt.rcParams["font.family"] = "Times New Roman"でグラフのフォントをTimes New Romanに設定します。
- データのプロット:
plt.plot(t, x, "r-", label="x")で経過時間に対するx座標を赤色の線でプロットします。plt.plot(t, y, "b-", label="y")で経過時間に対するy座標を青色の線でプロットします。
- 軸ラベルの設定:
plt.xlabel("Time[sec]", fontsize=16)でx軸のラベルを設定します。plt.ylabel("Position[px]", fontsize=16)でy軸のラベルを設定します。
- グリッドの表示:
plt.grid()でグラフにグリッドを表示します。
- 凡例の表示:
plt.legend(loc=1, fontsize=16)で凡例を表示します。loc=1は凡例の位置を右上に設定します。
- グラフの表示:
plt.show()でグラフを表示します。
プログラムの実行
if __name__ == "__main__":
main()
- この部分は、スクリプトが直接実行された場合に
main()関数を呼び出します。
関連ページ

PythonとOpenCVで画像処理プログラミング超入門
Python版OpenCVで画像処理プログラミングを行う方法を入門者向けにソースコード付きで解説するページです。
python.joho.info
2025.11.03

【画像処理超入門】アルゴリズムの仕組みと実装方法を簡単に解説
画像処理超アルゴリズムの仕組みとプログラミングによる実装方法を簡単に解説します。
algorithm.joho.info
コメント